 За извођење вежбе потребан је робот који може да се креће са монтираним жироскопским сензором. Жироскопски сензор може да детектује угаону брзину и угао скретања робота. Користећи параметре добијене од сензора направите програме за контролу робота, тако да робот својим кретањем формира путање у облику:
За извођење вежбе потребан је робот који може да се креће са монтираним жироскопским сензором. Жироскопски сензор може да детектује угаону брзину и угао скретања робота. Користећи параметре добијене од сензора направите програме за контролу робота, тако да робот својим кретањем формира путање у облику:
- ћириличног слова Г
- правоугаоника
- петоугаоника (странице су под углом од 72°)
- петокраке (144°)
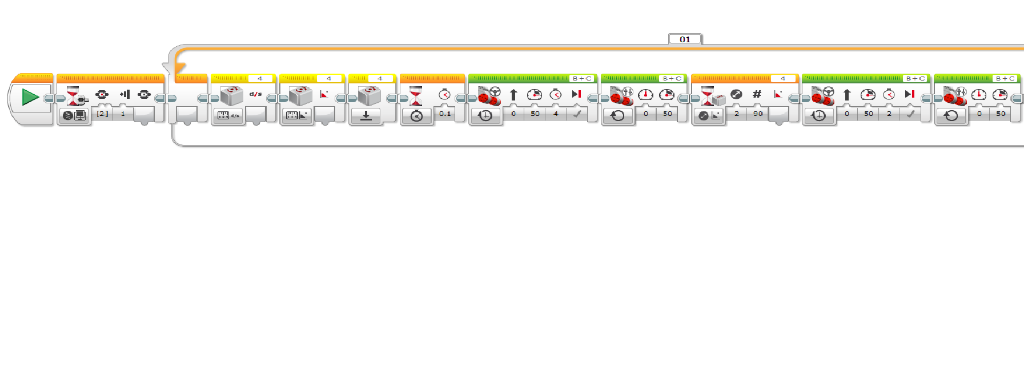
За успешну реализацију пре очитавања потребно је калибрисати сензор када је робот у стању мировања.

На слици изнад приказан је графички програм за калибрацију робота. Последња наредба паузира извршење програма за 0,1 секунду, како би сензор добио потребно врме и вратио исправан резултат. Сензор треба да врати нумеричку вредност, међутим, непосредно после ресетовања сензор ће вратити NaN, односно недефинисану вредност. Када се недефинисана вредност пореди са било којом нумеричком вредношћу, резултат поређења је нетачно (false). Искористите ту чињеницу и унапредите програм тако да не чека унапред задато време, већ да чека на вредност која није NaN.
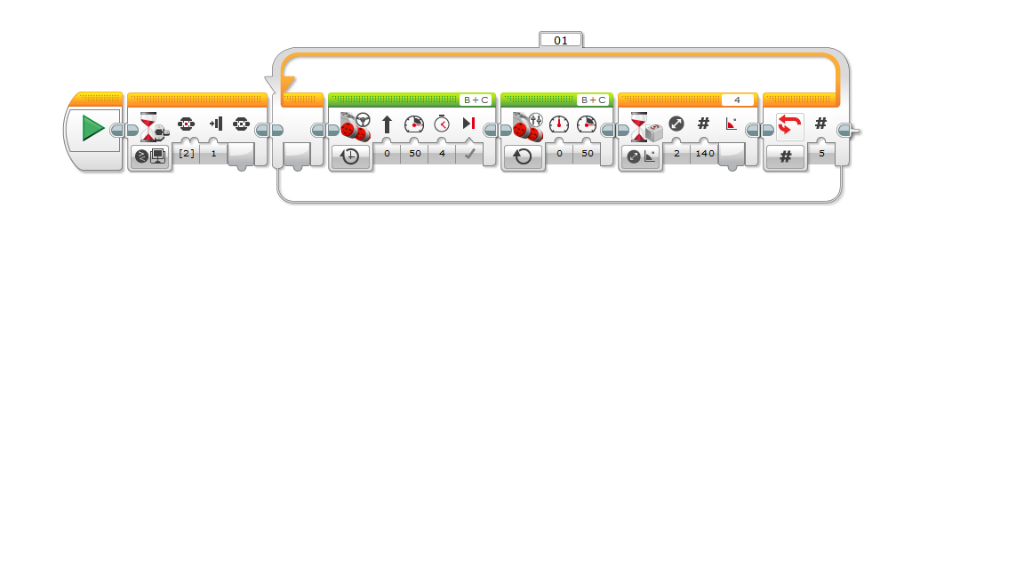
Проверите да ли робот заиста скреће онолико степени колико му је задато. Уколико то није случај, компезујте грешку одузимањем одређеног броја степени.
Како бисте учинили рад једноставнијим групишите више команди и креирајте свој блок.

На слици је приказан програм за скретање робота под углом од 90° са компензацијом од 4 степена. Да бисте направили свој блок изаберите из менија Tools команду My Block Builder. Селектујте све блокове осим константи, које ће постати улази Вашег новог блока.

Коментари:
Одговори:
Звезда
 Решење за правоугаоник
Решење за правоугаоник
 DeusDie 05.01.2015 Одељци: Зид Питања и одговори DeusDie |
1
|